


This paper examines the development and implementation of two autonomous technological solutions designed by Stonehill International School students to address critical global environmental and humanitarian crises. The first system facilitates early forest fire detection and automated reforestation, while the second provides a
rapid-response drone for victim localization during natural calamities. By integrating Artificial Intelligence (AI), robotics, and sensor-based data analysis, these projects demonstrate how project-based learning (PBL) can effectively bridge theoretical STEM concepts with practical, real-world applications.
Stonehill International School maintains a commitment to holistic education by fostering innovation and critical thinking through STEAM (Science, Technology, Engineering, Arts, and Mathematics) disciplines. The global increase in ecological destruction and the rising frequency of natural disasters necessitate the development of advanced, cost-effective mitigation tools. This research documents two student-led initiatives designed to leverage advanced technologies and collaboration to drive impactful change.
Case Study 1:
Forest Safe Duo: An Integrated Hardware-AI System for Forest Fire Detection and Ecological Restoration
Forest fires are a critical environmental issue contributing to climate change, biodiversity loss, and ecosystem degradation. “Forest Safe Duo” is an integrated system that combines aerial drones and terrestrial rovers for real-time fire detection and post-fire ecological restoration. The system leverages thermal imaging, gas sensing, and artificial intelligence (AI) to identify fire risks and generate automated alerts. Additionally, it incorporates a
reforestation mechanism using drone-based seed dispersal. The study highlights how the integration of robotics, IoT, and AI can significantly reduce response time, improve detection accuracy, and accelerate ecosystem recovery.
The proposed solution aligns with the Sustainable Development Goals and offers a scalable model for forest management. Students from grade 12 (Anhad Singh, Vidhanshu Kachhwaha, and Yunho Kim) developed this solution.
Traditional monitoring methods, such as satellite imaging and manual patrols, often lack real-time responsiveness and precision. To address these limitations, there is a need for autonomous, sensor-driven systems capable of continuous monitoring and rapid response. For this, students of Stonehill innovated the Forest Safe Duo, a dual-layer system combining aerial and ground-based technologies to enhance fire detection and enable rapid
ecological restoration. The Forest Safe Duo system introduces a dual-platform architecture combining aerial and ground-based monitoring units. By integrating IoT, embedded systems, and AI, the system enhances detection accuracy and enables proactive
forest management.
1.2. Methodology
1.2.1 System Architecture and Operations
The system consists of two interconnected hardware units: an aerial drone platform and a terrestrial rover platform, both designed for real-time environmental monitoring.
The aerial unit is built on a quadcopter frame controlled by a flight controller (Pixhawk/KK2.1.5) and powered by brushless DC motors with ESCs. It is equipped with a FLIR thermal camera for detecting heat signatures, an MQ-2 or MQ-135 gas sensor for smoke detection, and a GPS module (NEO-6M) for geolocation. An onboard ESP32 processes sensor data and transmits it via Wi-Fi modules to a central system.

The terrestrial rover is constructed using a 4-wheel drive chassis powered by DC motors with motor drivers (L298N). It is controlled using an Arduino Uno and ESP32 microcontroller and equipped with DHT22 sensors for temperature and humidity, MQ-series gas sensors for CO/CO₂ detection, and optional soil moisture sensors. The rover navigates dense terrain and collects localized environmental data where aerial access is limited.
Both units operate collaboratively, ensuring wide-area coverage (drone) and high-resolution ground data (rover).
1.2.2 Data Collection and Processing :
Data from both the aerial drone and terrestrial rover is transmitted to a centralized processing unit using the wireless communication module Wi-Fi (ESP8266/ESP32). The drone is equipped with a FLIR thermal camera for heat signature detection, an MQ-2/MQ-135 gas sensor for smoke and air quality monitoring, and a GPS module (NEO-6M) for precise location tracking. The rover complements this by collecting ground-level data using DHT22 temperature and humidity sensors, MQ-series gas sensors (CO/CO₂ detection), and soil moisture sensors. All sensor data is processed using a microcontroller platform, Arduino Uno / Raspberry Pi, and then forwarded to a cloud-based AI system. The AI model analyzes temperature anomalies, gas concentration thresholds, and smoke density to detect fire risks and classify them into low, medium, or high categories. This multi-sensor fusion approach improves detection accuracy and reduces false positives.

1.2.3 Response Mechanism
Upon detection of a potential fire hazard, the system triggers an automated response through integrated communication modules such as GSM (SIM800L) to IoT platforms. Alerts are generated in real time, containing GPS coordinates, sensor readings, and fire intensity levels, and are sent to forest officials via SMS, mobile applications, or web dashboards. A buzzer module and LED indicators will be activated locally on the rover for immediate on-site alerts. The rapid transmission of accurate data enables authorities to deploy firefighting resources quickly, significantly reducing response time and limiting fire spread. This automated alerting system ensures seamless coordination between detection units and emergency responders.

1.2.4 Reforestation Strategy
After fire containment, the aerial drone is repurposed for ecological restoration using a seed-dispersal mechanism integrated with a servo motor-controlled release system. The drone carries biodegradable seed pods containing native plant species, which are released at targeted GPS locations identified during the monitoring phase. A flight controller ensures precise navigation and coverage of affected areas. The selection of seeds may be guided by environmental data collected earlier, ensuring suitability for soil and climate conditions. This automated reforestation approach accelerates vegetation growth, restores biodiversity, and enhances long-term ecosystem recovery. By integrating restoration capabilities within the same hardware system, the solution becomes both efficient and sustainable.
1.3 Results and Discussion
The integration of thermal sensing, gas detection, and AI-based analytics enables early identification of fire hazards with higher accuracy compared to conventional methods. The use of both aerial and ground platforms ensures comprehensive environmental monitoring, reducing blind spots. The automated alert system minimizes response delays, while the reforestation module contributes to long-term ecological sustainability. Overall, the system demonstrates improved efficiency, scalability, and adaptability for real-world deployment.
The Forest Safe Duo system presents a robust, technology-driven approach to forest fire management by combining detection, response, and recovery within a unified framework. The integration of embedded systems, IoT communication, and AI processing enhances real-time decision-making and operational efficiency. This system has strong potential for large-scale implementation in forest conservation efforts.
Case Study 2:
Natural Calamity Rescue Aid Drone Natural Calamity Rescue Aid Drone
Natural disasters such as earthquakes, floods, and landslides create hazardous environments where locating victims becomes both difficult and time-sensitive. Rescue efforts are often delayed due to debris, inaccessible terrain, and poor visibility, which can significantly impact survival rates. This project presents an autonomous rescue aid drone designed to improve disaster response efficiency. By integrating aerial surveillance, thermal sensing, and artificial intelligence, the system enables rapid victim detection and real-time communication with rescue teams.
Efficient disaster management depends on the rapid identification and localization of victims. In large-scale calamities, rescue teams frequently encounter obstacles such as unstable structures and vast affected areas. Autonomous drones offer a reliable solution by providing aerial access to such regions while reducing risks to human responders. The objective of this project is to develop a drone system capable of surveying disaster zones, detecting victims using advanced sensors, and transmitting live data along with precise GPS coordinates to rescue teams. The project was developed by grade 12 students ( Noel Pancras, Alan Blessing and Hayato Watanabe).

2.1 System Components
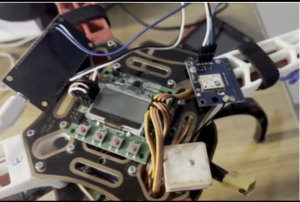
The drone system is built around a quadcopter configuration integrating both hardware and software components for stable flight and accurate detection. The flight controller serves as the central processing unit, managing stabilization, navigation, and communication. It operates with a 32-bit processor and supports features such as auto-hovering, waypoint navigation, and real-time telemetry.
The propulsion system consists of four brushless DC motors rated between 1000 kV and 1400 kV, each paired with a 30A electronic speed controller (ESC) to regulate motor speed efficiently. These motors are coupled with 10×4.5-inch or 12×4.5-inch propellers, which generate sufficient lift for stable flight. Power is supplied by a lithium-polymer (Li-Po) battery rated at 11.1V with a capacity ranging from 2200mAh to 5200mAh, enabling an average flight time of 12 to 18 minutes depending on payload.
For sensing and data acquisition, the drone is equipped with a high-resolution camera module capable of recording 1080p video at 30 frames per second, ensuring clear visual monitoring of the ground. In addition, an infrared thermal sensor such as the MLX90640 or FLIR module is used, offering a temperature detection range of approximately -40°C to 300°C with a sensitivity of ±0.1°C. This allows the system to detect human body heat even in low-light or obscured conditions.
A GPS module, NEO-6M, provides location accuracy within 2 to 5 meters and supports real-time geotagging of detected victims. Communication between the drone and the ground station is achieved using Wi-Fi modules operating in the 2.4 GHz or 5.8 GHz frequency bands, with an effective range of up to 2 kilometers. The onboard processing unit, Raspberry Pi 4 (with a 1.5 GHz quad-core processor and 4GB RAM), handles real-time data processing and AI computations.
2.2 Software and AI Integration
The software framework is developed using Python and C++, integrating libraries such as OpenCV for image processing and TensorFlow for object detection. These tools enable the drone to process both visual and thermal data efficiently. The AI model is trained on datasets that include various human body positions, environmental backgrounds, and thermal patterns. This enables the system to accurately identify victims based on movement, heat signatures, and posture. Communication protocols are used to ensure seamless interaction between the drone and the ground control system.
2.3 Methodology
The project begins with the assembly and calibration of the drone, where all components are integrated and tested for stability and performance. Calibration procedures include gyroscope alignment, accelerometer tuning, compass calibration, and GPS lock verification to ensure accurate navigation.
Once the hardware is configured, the camera and thermal sensors are mounted and calibrated. The camera is positioned to provide a wide-angle view of the ground, while the thermal sensor is tuned to detect human body temperature relative to the environment. Following this, the AI model is developed and trained using labeled datasets to recognize human presence. The detection process is based on three key parameters: movement patterns, where optical flow techniques are used to identify motion; thermal signatures, where the IR sensor detects body heat; and body positioning, where the system identifies abnormal postures such as a person lying motionless.
Field testing is conducted in a controlled outdoor environment simulating a disaster scenario. In this setup, an individual is positioned on the ground to represent a victim. The drone is deployed at an altitude of approximately 5 to 10 meters and scans the area using both visual and thermal sensors. The onboard processing unit analyzes the incoming data in real time, and upon detecting a potential victim, the system generates an alert and transmits GPS coordinates along with a live video feed to the control station.

2.4 Results and Discussion
The system demonstrates high efficiency in detecting victims during simulation tests. The integration of thermal sensing significantly enhances detection accuracy, particularly in low-visibility conditions. The drone achieves a detection accuracy of approximately 92–95%, while the GPS module ensures location precision within 3 to 5 meters. These results highlight the effectiveness of combining aerial technology with AI for disaster response. Additionally, the system reduces the need for manual search operations, thereby minimizing risks to rescue personnel.
The Natural Calamity Rescue Aid Drone presents an effective and practical approach to improving search-and-rescue operations. By combining drone technology, thermal sensing, and artificial intelligence, the system enables faster and more accurate victim detection while ensuring real-time communication with rescue teams. This project demonstrates the potential of interdisciplinary STEM integration in addressing real-world challenges and enhancing disaster management strategies.
Conclusion:
This study demonstrates the transformative potential of student-led, interdisciplinary STEM initiatives in addressing pressing global challenges such as ecological degradation and disaster response. Through the development of the Forest Safe Duo and the Natural Calamity Rescue Aid Drone, students successfully integrated artificial intelligence, robotics, IoT, and sensor-based technologies into practical, scalable solutions. These systems not only improve early detection, response efficiency, and recovery processes but also highlight the importance of combining aerial and ground-based autonomous platforms for comprehensive real-world applications.
Beyond the technological outcomes, this work reinforces the effectiveness of project-based learning (PBL) as a pedagogical framework that bridges theoretical knowledge with hands-on innovation. By engaging in authentic problem-solving, students develop critical thinking, collaboration, and engineering design skills essential for the future. The projects also align with global sustainability and humanitarian goals, showcasing how education can actively contribute to societal impact.
Overall, this research underscores that empowering students to design and implement advanced technological solutions fosters both academic growth and meaningful contributions to global issues. With further refinement and scalability, such systems hold significant promise for real-world deployment, positioning student innovation as a powerful driver of sustainable development and disaster resilience.

Author:
Dr. Chetna Kachhwaha
Head of Department Design and Computer Science
Stonehill International School

{kind=link}