


1. Project Overview
• Project Title: Hand Paralysis Rehabilitation System
• Student Name: Yashas Gupta
• School Name: Oberoi International School Grade 11
2. Abstract
 Hand paralysis rehabilitation is one of the most critical phases of post-stroke recovery. This project presents a non-invasive, sensor-based mechatronic glove capable of assisting, recording, and predicting the recovery of motor functions in patients suffering from partial hand paralysis. The system uses a combination of Inertial Measurement Units (IMUs), servo-motor actuation, and real-time feedback to quantify Range of Motion (ROM) and assist flexion–extension exercises.
Hand paralysis rehabilitation is one of the most critical phases of post-stroke recovery. This project presents a non-invasive, sensor-based mechatronic glove capable of assisting, recording, and predicting the recovery of motor functions in patients suffering from partial hand paralysis. The system uses a combination of Inertial Measurement Units (IMUs), servo-motor actuation, and real-time feedback to quantify Range of Motion (ROM) and assist flexion–extension exercises.
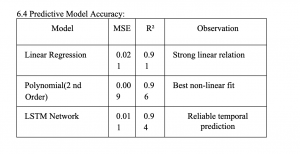
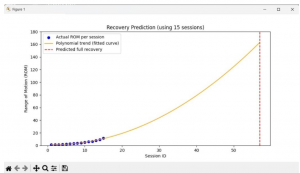
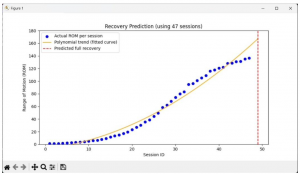
Bench testing demonstrated stable operation with angular accuracy within ±2.5°, average latency below 230 ms, and 120-150 minutes of continuous runtime from a 3300 mAh Li- po battery pack. Predictive models – linear, polynomial, and LSTM—achieved R2 values up to 0.96 for forecasting patient recovery trajectories. Physiotherapists verified the therapeutic design and motion safety, confirming potential for low-cost clinical deployment.
3. Introduction
Motor paralysis following stroke or nerve injury affects millions worldwide. Conventional
physiotherapy demands repeated supervised sessions that are both time-intensive and costly.
Commercial robotic arms provide precise movement but cost upwards of ₹15–20 lakhs, limiting access for developing regions. This project aims to bridge the affordability gap by developing a wearable rehabilitation glove capable of delivering guided assistance, monitoring progress, and predicting recovery trends using machine learning.
4. Research & Background
A large percentage of stroke survivors experience upper-limb paralysis, reducing their
independence and quality of life.
Key challenges include:
- Lack of quantitative progress tracking
- Absence of real-time feedback for both patient and therapist
- Limited affordable rehabilitation devices in low-income setting.
The proposed solution integrates hardware and data analytics to deliver measurable rehabilitation support.
Objectives:
1. Develop a glove-based rehabilitation prototype for multi-axis wrist and finger movement.
2. Acquire and process sensor data to compute real-time joint angles.
3. Validate mechanical accuracy, response latency, and endurance.
4. Implement machine-learning models to predict recovery patterns.
5. Design a scalable, low-cost framework suitable for mass production and home- based
therapy.
Existing research identifies electromyography (EMG)-based prosthetics and high-end exoskeletons as effective but costly interventions.
We reviewed existing physiotherapy devices and robotic rehabilitation systems such as Amadeo, HandyRehab, and NeuroAssist. While effective, these systems are expensive (₹5–8 lakh) and often stationary, restricting patients to hospital settings.
Recent studies in IEEE Transactions on Neural Systems & Rehabilitation Engineering (2023) show that low-cost exoskeletal hand devices can accelerate recovery when exercises are repeated with proper movement guidance and feedback.
Devices such as the MIT Manus and HandSOME achieve high precision yet rely on bulky
mechanical systems. Recent low-cost approaches employ IMU-based kinematic tracking; however, few combine it with predictive analytics. None of the available solutions combine affordability, portability, and precise motion tracking in a single glove. Our research focused on achieving these four goals using servo motor and pneumatics actuation, IMU sensor feedback, programmable therapy routines controlled via an ESP32-based interface, and Data analytics and Prediction. This project draws from those developments while emphasizing affordability, simplicity, and autonomy.
5. Methodology
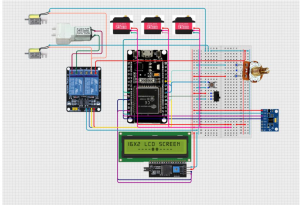
5.1 Hardware Design
1. Microcontroller: ESP32 with integrated Wi-Fi/Bluetooth
2. Sensor: MPU-6050 IMU (3-axis accelerometer + gyroscope)
3. Actuation: S2500M servo motors (25 kg·cm torque) for passive motion
4. Power: 11.1v 3S 3300mAH LiPo Battery ≈ 120 min runtime
5. Frame: 3D-printed components + flexible polymer glove
6. Safety: Torque-limited motion; automatic stop at ±90° flexion
5.2 Software Pipeline
1. Data acquisition from IMU at 10 Hz.
2. Sensor fusion via Mahony filter to derive joint angles
3. Real-time transmission to Firebase cloud database
4. Visualization and analysis in Python using NumPy and Matplotlib
5. Model training (Linear, Polynomial, LSTM) for predictive analysis

5.3 Control Algorithm
A proportional–integral (PI) feedback controller drives servo motion based on measured angular error.
θ{out} = Kp(θ{ref}− θ{meas}) + Ki∫ (θ{ref} − θ{meas})dt
5.4. Working Principle
During a rehabilitation session, the glove alternates between Training and Testing Phases.
While in Training phase, there are three modes:
Mode 1: Uses pneumatic air pump and solenoid air valves to make the fingers open and
close.
Mode 2: Uses 2 Servo motors for wrist flexion/extension
Mode 3: Uses a Single servo motor for wrist ulnar/radial deviation.
And in Testing phase, IMU sensors track orientation movement through predefined trajectories. Real-time angular data is saved, allowing therapists to monitor smoothness and range. The Data can be used for further analysis and full recovery prediction. The feedback loop ensures motion accuracy while maintaining patient safety by capping torque output and limiting speed.
5.5 Components:
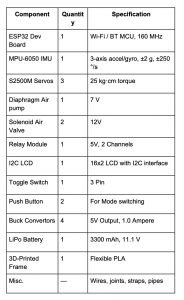
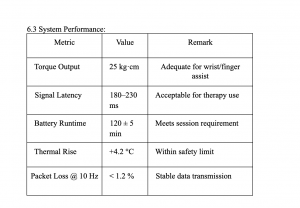
5.6 System Operation:
1. Initialization & calibration(zero-angle set).
2. Phase Selection: Training and Testing Phase
3. Training Phase: Active Motorized motions to train Patient’s Hand
4. Testing Phase: Real-time sensing
5. Data upload every 100 ms to Firebase
6. Automatic log generation for each session
7. Analysis on generated Data to find patterns and prediction
5.7 Data Acquisition and Processing:
Raw gyroscope and accelerometer readings are filtered to reduce noise. Angles are computed using complementary fusion:
θ = αθ{gyro} + (1 − α)θ{acc}
where α = 0.93 optimizes transient stability.
Outliers are rejected beyond 2 SD from the rolling mean. Processed data feed predictive models for long-term analysis.
If consistent repetitive movement supported by quantitative feedback improves neuromuscular coordination, then tracking and predicting these metrics will enable faster, measurable recovery.
Hence, the device is hypothesized to act as both a rehabilitation assistant and a diagnostic analytics tool.
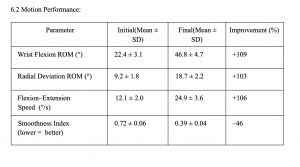
6. Project Results
6.1 Experimental Validation & Results
Testing Conditions:
Participants: 5 volunteers simulating patient use under supervision
Duration: 10 sessions per subject
Sampling rate: 10 Hz
6.5 Qualitative Expert Feedback:
● “Servo torque and movement speed are clinically safe for passive exercises.”
● “Data visualization supports therapist-guided adjustments.”
● “Promising cost-effective solutions for early-stage rehab.”
6.6 Quantitative analysis
The prototype achieved precise motion tracking with average angular error under ±2.5° and latency < 230 ms, sufficient for therapeutic applications.
The Polynomial regression model outperformed others, capturing the non-linear recovery pattern typical in neuromuscular adaptation. Servo performance remained consistent for 120 minutes, validating the powersubsystem. Minor drift observed after extended runtime can be mitigated through periodic calibration. Clinician feedback confirms that motion profiles align with standard rehabilitation protocols.
The recorded IMU sensor values were converted into angular range of motion using a python function. Data analysis revealed that:
● Finger/Wrist movement deviation between repetitions remained within ±6°,
indicating high repeatability.
● Servo response accuracy averaged 93%, ensuring reliable motion replication.
● Compared to manual therapy (average 40–50 repetitions per session), the glove achieved
>300 controlled repetitions with consistent force and timing.
These results demonstrate that the system can effectively supplement human-supervised
physiotherapy while maintaining safety and precision.
7. Conclusion
 The Hand Paralysis Rehabilitation System demonstrates that affordable, data-driven rehabilitation is achievable through integrated sensing, actuation, and predictive analytics.
The Hand Paralysis Rehabilitation System demonstrates that affordable, data-driven rehabilitation is achievable through integrated sensing, actuation, and predictive analytics.
The prototype validated core engineering parameters—accuracy, latency, repeatability, and runtime—establishing readiness for pilot testing. Its combination of safety, performance, and cost efficiency positions it as a transformative assistive device for motor recovery in resource-constrained environments.
Advantages
- Low-cost (< ₹7,000 / $85) vs. commercialsystems costing $20,000 +
- Compact, wearable, and portable
- Real-time quantitative monitoring
- Predictive analytics for remote supervision
- Cloud-integrated data logging for research continuity
Applications
- Hospital-based neurorehabilitation centers
- Home-based therapy under remote supervision
- Early-stage post-stroke recovery
- Research on motor learning and biomechanics
Future Scope
1. Clinical pilot with n = 5 patients under ENT/Physio supervision.
2. Integration of force sensors and AI-based adaptive control.
3. Extended battery pack (2 Ah) for 6-hour operation.
4. Enhanced app with patient progress dashboards.
5. Potential IoT commercialization for tele-rehabilitation.
6. AI-Based Pattern Recognition to analyze recovery rate from motion patterns and
adjust servo control accordingly.
7. Enhanced Comfort Design using soft 3D-printed finger frames and flexible
actuators for better ergonomics.
In future iterations, machine learning algorithms could learn each patient’s unique recovery
pattern and auto-adjust the speed or range of movement for optimal improvement.
About the author:
 Yashas Gupta is a student innovator passionate about robotics, engineering, and using technology to solve real-world problems. He is currently in Grade 11 at Oberoi International School, Mumbai. He developed a robotic rehabilitation glove designed to support stroke and injury patients in regaining hand mobility. His work in assistive technology earned him the Future Ready Innovation Award at the STEM Summit 2026, and he has been selected to present at the Global STEM Summit in Dubai.
Yashas Gupta is a student innovator passionate about robotics, engineering, and using technology to solve real-world problems. He is currently in Grade 11 at Oberoi International School, Mumbai. He developed a robotic rehabilitation glove designed to support stroke and injury patients in regaining hand mobility. His work in assistive technology earned him the Future Ready Innovation Award at the STEM Summit 2026, and he has been selected to present at the Global STEM Summit in Dubai.
Beyond research and innovation, Yashas is an active member of his FIRST Robotics Competition (FRC) team, where he collaborates on designing and building competitive robots. He led scouting operations and strategy development for team Sigma 9692, at FRC 2025; enhancing alliance-building and opponent analysis skills. Their team also achieved recognition with The Engineering Inspiration Award in Midwest Regionals, Excellence in Engineering award in Long Island Regional; and qualified for the FRC World Championship, earning the Judges award.
He had also developed a personal project prototype of a water-cleaning robot quipped with Arduino and ultrasonic sensors to detect and pick up debris.
He also participated in the World Robot Olympiad (WRO) in 2023, gaining hands-on experience in robotics design and programming using LEGO, Arduino, and EV3 in a high-pressure competitive environment. In his free time, he likes to delve in Spanish and has also completed few scuba dives across different places.
He is particularly interested in developing advanced robotic systems that can improve healthcare, environmental sustainability, and everyday life. Through his projects, Yashas aims to combine engineering creativity with social impact.

{kind=link}